راه اول این هست که در جهت x از تصویر مشتق بگیرید به این شکل خطوط مستقیم حذف میشن(چون تغییرات در راستای خطوط مستقیم 0 هست) :
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
int main(int argc, char** argv)
{
cv::Mat src= cv::imread("F:\\note.jpg");
cv::imshow("Before", src);
cv::GaussianBlur(src,src,cv::Size(3,3),100);
cv::cvtColor(src, src, CV_RGB2GRAY);
cv::Sobel(src, src,CV_8U, 1, 0, 3, 1, 0, cv::BORDER_DEFAULT);
cv::convertScaleAbs(src, src);
cv::threshold(src, src,50, 255, cv::THRESH_BINARY);
cv::bitwise_not(src, src);
cv::imshow("AFter",src );
cv::waitKey(0);
return 0;
}
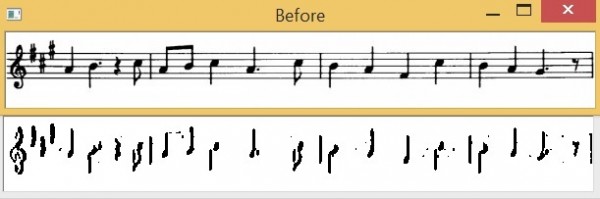
روش بالا به همراه خطوط قسمتی از note ها که افقی هستن رو هم هم حذف می کنه .
از آستانه گیری SAUVOLA هم میشه استفاده کرد که این جا خوب جواب میده :
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <algorithm>
#include <numeric>
using namespace cv;
using namespace std;
enum class BhThresholdMethod{ OTSU, NIBLACK, SAUVOLA, WOLFJOLION };
class BhThresholder
{
public:
void doThreshold(InputArray src, OutputArray dst, const BhThresholdMethod &method);
private:
};
#define uget(x,y) at<unsigned char>(y,x)
#define uset(x,y,v) at<unsigned char>(y,x)=v;
#define fget(x,y) at<float>(y,x)
#define fset(x,y,v) at<float>(y,x)=v;
// *************************************************************
// glide a window across the image and
// create two maps: mean and standard deviation.
// *************************************************************
//#define BINARIZEWOLF_VERSION "2.3 (February 26th, 2013)"
double calcLocalStats(Mat &im, Mat &map_m, Mat &map_s, int win_x, int win_y) {
double m, s, max_s, sum, sum_sq, foo;
int wxh = win_x / 2;
int wyh = win_y / 2;
int x_firstth = wxh;
int y_lastth = im.rows - wyh - 1;
int y_firstth = wyh;
double winarea = win_x*win_y;
max_s = 0;
for (int j = y_firstth; j <= y_lastth; j++)
{
// Calculate the initial window at the beginning of the line
sum = sum_sq = 0;
for (int wy = 0; wy < win_y; wy++)
for (int wx = 0; wx<win_x; wx++) {
foo = im.uget(wx, j - wyh + wy);
sum += foo;
sum_sq += foo*foo;
}
m = sum / winarea;
s = sqrt((sum_sq - (sum*sum) / winarea) / winarea);
if (s > max_s)
max_s = s;
map_m.fset(x_firstth, j, m);
map_s.fset(x_firstth, j, s);
// Shift the window, add and remove new/old values to the histogram
for (int i = 1; i <= im.cols - win_x; i++) {
// Remove the left old column and add the right new column
for (int wy = 0; wy<win_y; ++wy) {
foo = im.uget(i - 1, j - wyh + wy);
sum -= foo;
sum_sq -= foo*foo;
foo = im.uget(i + win_x - 1, j - wyh + wy);
sum += foo;
sum_sq += foo*foo;
}
m = sum / winarea;
s = sqrt((sum_sq - (sum*sum) / winarea) / winarea);
if (s > max_s)
max_s = s;
map_m.fset(i + wxh, j, m);
map_s.fset(i + wxh, j, s);
}
}
return max_s;
}
void NiblackSauvolaWolfJolion(InputArray _src, OutputArray _dst, const BhThresholdMethod &version, int winx, int winy, double k, double dR) {
Mat src = _src.getMat();
Mat dst = _dst.getMat();
double m, s, max_s;
double th = 0;
double min_I, max_I;
int wxh = winx / 2;
int wyh = winy / 2;
int x_firstth = wxh;
int x_lastth = src.cols - wxh - 1;
int y_lastth = src.rows - wyh - 1;
int y_firstth = wyh;
int mx, my;
// Create local statistics and store them in a double matrices
Mat map_m = Mat::zeros(src.size(), CV_32FC1);
Mat map_s = Mat::zeros(src.size(), CV_32FC1);
max_s = calcLocalStats(src, map_m, map_s, winx, winy);
minMaxLoc(src, &min_I, &max_I);
Mat thsurf(src.size(), CV_32FC1);
// Create the threshold surface, including border processing
// ----------------------------------------------------
for (int j = y_firstth; j <= y_lastth; j++) {
// NORMAL, NON-BORDER AREA IN THE MIDDLE OF THE WINDOW:
for (int i = 0; i <= src.cols - winx; i++) {
m = map_m.fget(i + wxh, j);
s = map_s.fget(i + wxh, j);
// Calculate the threshold
switch (version) {
case BhThresholdMethod::NIBLACK:
th = m + k*s;
break;
case BhThresholdMethod::SAUVOLA:
th = m * (1 + k*(s / dR - 1));
break;
case BhThresholdMethod::WOLFJOLION:
th = m + k * (s / max_s - 1) * (m - min_I);
break;
default:
cerr << "Unknown threshold type in ImageThresholder::surfaceNiblackImproved()\n";
exit(1);
}
thsurf.fset(i + wxh, j, th);
if (i == 0) {
// LEFT BORDER
for (int i = 0; i <= x_firstth; ++i)
thsurf.fset(i, j, th);
// LEFT-UPPER CORNER
if (j == y_firstth)
for (int u = 0; u < y_firstth; ++u)
for (int i = 0; i <= x_firstth; ++i)
thsurf.fset(i, u, th);
// LEFT-LOWER CORNER
if (j == y_lastth)
for (int u = y_lastth + 1; u < src.rows; ++u)
for (int i = 0; i <= x_firstth; ++i)
thsurf.fset(i, u, th);
}
// UPPER BORDER
if (j == y_firstth)
for (int u = 0; u < y_firstth; ++u)
thsurf.fset(i + wxh, u, th);
// LOWER BORDER
if (j == y_lastth)
for (int u = y_lastth + 1; u < src.rows; ++u)
thsurf.fset(i + wxh, u, th);
}
// RIGHT BORDER
for (int i = x_lastth; i < src.cols; ++i)
thsurf.fset(i, j, th);
// RIGHT-UPPER CORNER
if (j == y_firstth)
for (int u = 0; u < y_firstth; ++u)
for (int i = x_lastth; i < src.cols; ++i)
thsurf.fset(i, u, th);
// RIGHT-LOWER CORNER
if (j == y_lastth)
for (int u = y_lastth + 1; u < src.rows; ++u)
for (int i = x_lastth; i < src.cols; ++i)
thsurf.fset(i, u, th);
}
cerr << "surface created" << endl;
for (int y = 0; y < src.rows; ++y)
for (int x = 0; x < src.cols; ++x)
{
if (src.uget(x, y) >= thsurf.fget(x, y))
{
dst.uset(x, y, 255);
}
else
{
dst.uset(x, y, 0);
}
}
}
void BhThresholder::doThreshold(InputArray _src, OutputArray _dst, const BhThresholdMethod &method)
{
Mat src = _src.getMat();
int winx = 0;
int winy = 0;
float optK = 0.5;
if (winx == 0 || winy == 0) {
winy = (int)(2.0 * src.rows - 1) / 3;
winx = (int)src.cols - 1 < winy ? src.cols - 1 : winy;
// if the window is too big, than we asume that the image
// is not a single text box, but a document page: set
// the window size to a fixed constant.
if (winx > 100)
winx = winy = 40;
}
// Threshold
_dst.create(src.size(), CV_8UC1);
Mat dst = _dst.getMat();
//medianBlur(src,dst,5);
GaussianBlur(src, dst, Size(5, 5), 0);
//#define _BH_SHOW_IMAGE
#ifdef _BH_DEBUG
#define _BH_SHOW_IMAGE
#endif
//medianBlur(src,dst,7);
switch (method)
{
case BhThresholdMethod::OTSU:
threshold(dst, dst, 128, 255, CV_THRESH_OTSU);
break;
case BhThresholdMethod::SAUVOLA:
case BhThresholdMethod::WOLFJOLION:
NiblackSauvolaWolfJolion(src, dst, method, winx, winy, optK, 128);
}
bitwise_not(dst, dst);
#ifdef _BH_SHOW_IMAGE
#undef _BH_SHOW_IMAGE
#endif
}
int main(int argc, char** argv)
{
cv::Mat src= cv::imread("F:\\note.jpg");
cv::imshow("Before", src);
cv::GaussianBlur(src,src,cv::Size(3,3),100);
cv::cvtColor(src, src, CV_RGB2GRAY);
BhThresholder th;
th.doThreshold(src, src, BhThresholdMethod::SAUVOLA);
cv::bitwise_not(src, src);
cv::imshow("After",src );
cv::waitKey();
return 0;
}

یک راه دیگه میتونه این باشه که خطوط افقی روی تصویر رو بدست آورد(مثلا با houghline transform) بعد همسایگی پیکسل های بالا و پایین خطوط رو چک کرد در صورت سیاه نبودن پیکسل رو حذف کرد .